Design Statements
Project Need Statement
Your team has detected a single fuel rod which can be used to run the reactor just enough to send a single 2 person team into orbit. The only chance is to load the 2 person team into a rover, complete the maze. The tragedy is that only the fastest team will be able to drive onto the space shuttle, leaving the remaining personnel with a plan that the fastest two person team will return with help.
Project Solution Statement
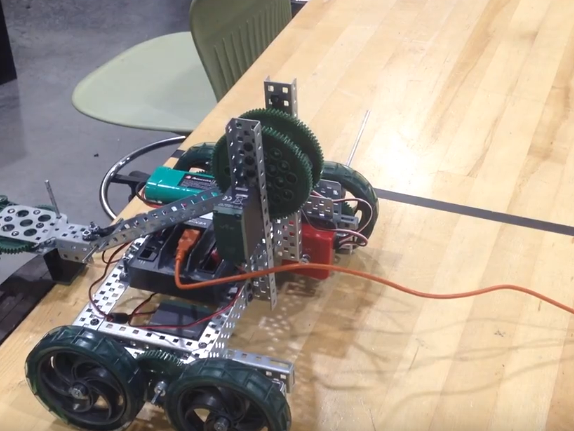
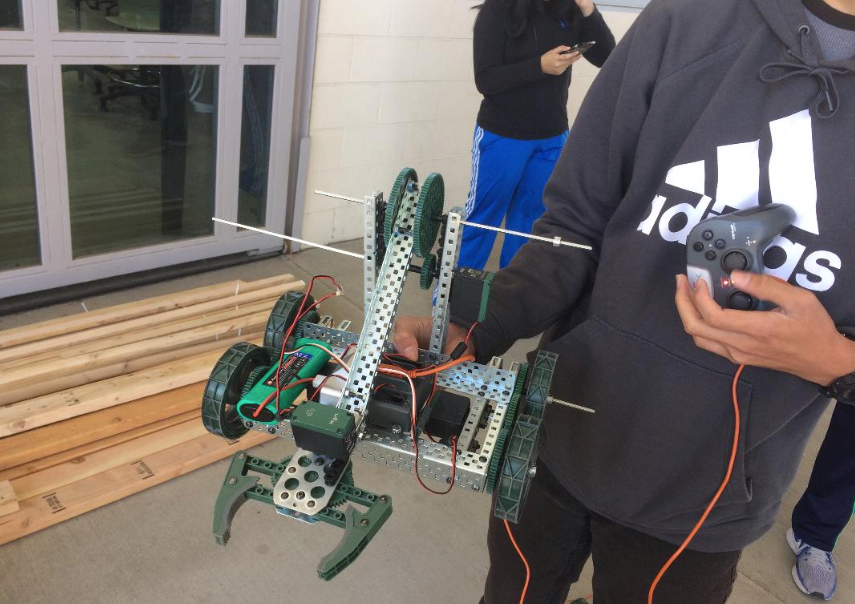
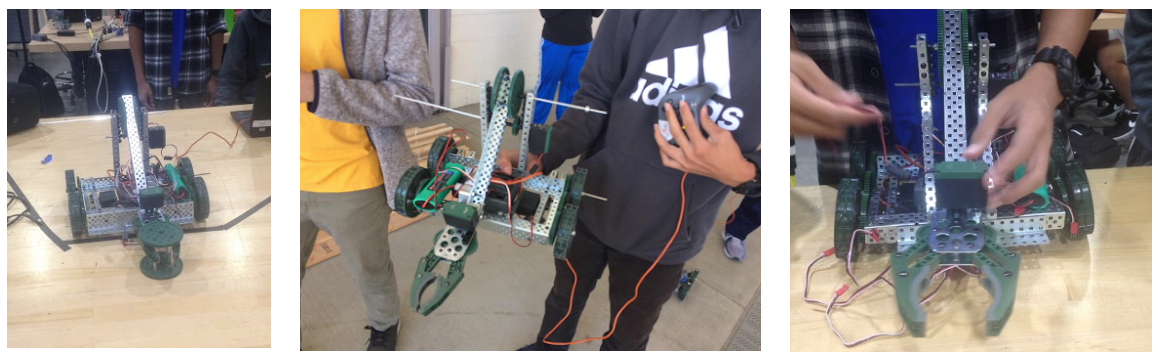
The robot was programmed to drive using the remote controller to navigate the maze in order to retrieve the fuel.
Constraints and Criteria
Constraints List
Position the robot on the home base.
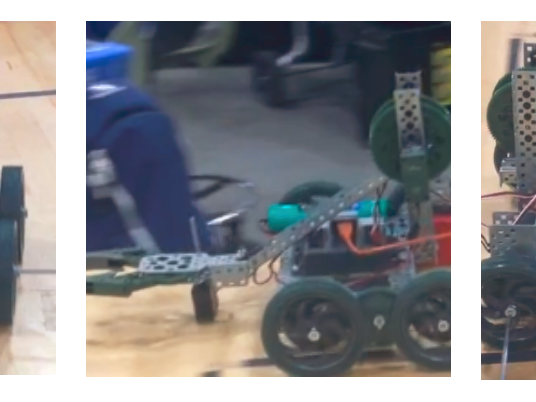
The robot starts toward the rector through the maze like complex, avoiding the spent fuel rods.
The robot picks up the black fuel rod and deposits it into the rector.
The robot pushes the reactor back into position on the reactor pad
The robot drives over switch to start the space shuttle countdown.
The robot drives onto space shuttle.
Criteria List
Navigate the path with little stray from area.
All functions programmed on the robot work as planned.
Robot doesn't overshoot and grabs the object without failure.
Active Code
#pragma config(Motor, port3, hands, tmotorVex393_HBridge, openLoop)
#pragma config(Motor, port2, claw, tmotorServoContinuousRotation, openLoop)
#pragma config(Motor, port10, rightm, tmotorServoContinuousRotation, openLoop)
#pragma config(Motor, port1, leftm, tmotorVex393_HBridge, openLoop)
//*!!Code automatically generated by 'ROBOTC' configuration wizard !!*//
task main()
{
while(1==1)
{
motor(leftm)=vexRT[Ch3]/0.5;
motor(rightm)=vexRT[Ch2]/0. if(vexRT[Btn7U]==1)
{
motor(claw) = 60;
}
else if(vexRT[Btn7D]==1)
{
motor(claw) = -60;
}
else
motor(claw) = 0;
if(vexRT[Btn8U]==1)
{
motor(hands) = 90;
}
else if(vexRT[Btn8D]==1)
{
motor(hands) = -90;
}
else
motor(hands) = 0;
}
}