Constraints and Criteria
Constraints List
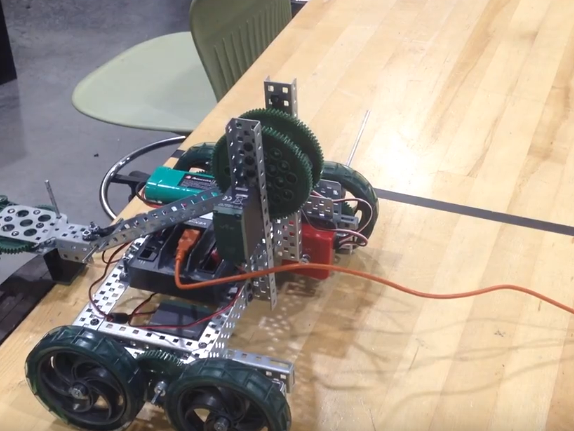
Position the robot on the home base
Robot automatically maneuvers to avoid the black line
Robot retrieves "fuel" and brings it back to base
Criteria List
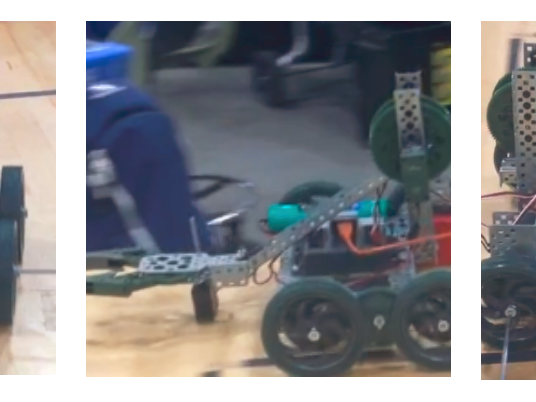
Navigate the path without running over the boundaries.
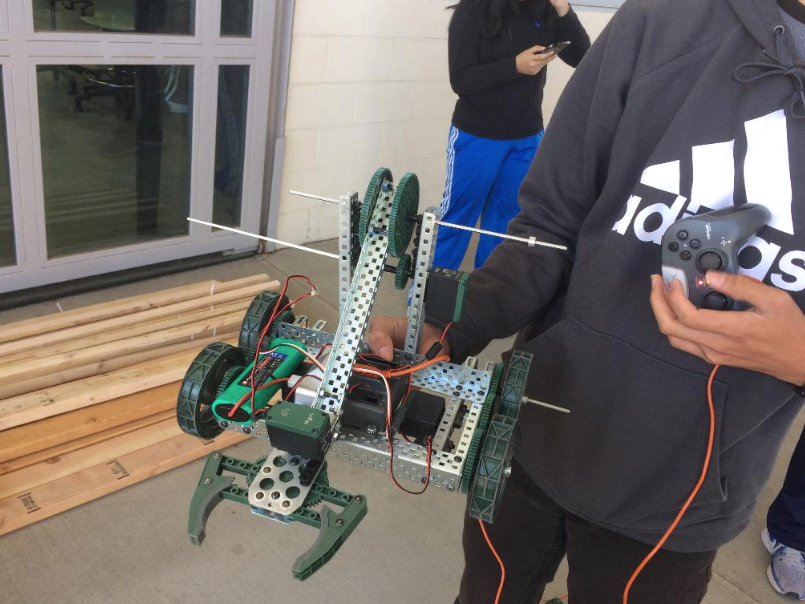
Smoothly pick up and hold fuel containers
All functions programmed on the robot work as planned



Code
#pragma config(Sensor, in1, l, sensorLineFollower)
#pragma config(Sensor, in2, c, sensorLineFollower)
#pragma config(Sensor, in3, r, sensorLineFollower)
#pragma config(Motor, port2, rm, tmotorVex393_MC29, openLoop, driveRight)
#pragma config(Motor, port4, claw, tmotorVex393_MC29, openLoop)
#pragma config(Motor, port10, lm, tmotorVex393_HBridge, openLoop)
//*!!Code automatically generated by 'ROBOTC' configuration wizard !!*//
#pragma config(Sensor, in2, c, sensorLineFollower)
#pragma config(Sensor, in3, r, sensorLineFollower)
#pragma config(Motor, port2, rm, tmotorVex393_MC29, openLoop, driveRight)
#pragma config(Motor, port4, claw, tmotorVex393_MC29, openLoop)
#pragma config(Motor, port10, lm, tmotorVex393_HBridge, openLoop)
//*!!Code automatically generated by 'ROBOTC' configuration wizard !!*//
task main()
{
setServo(claw, -127);
wait(1);
startMotor(lm,-25);
startMotor(rm,25);
untilDark(2050, c);
stopMotor(lm);
stopMotor(rm);
setServo(claw, 127);
wait(2);
startMotor(lm,50);
startMotor(rm,-50);
wait(2);
{
setServo(claw, -127);
wait(1);
startMotor(lm,-25);
startMotor(rm,25);
untilDark(2050, c);
stopMotor(lm);
stopMotor(rm);
setServo(claw, 127);
wait(2);
startMotor(lm,50);
startMotor(rm,-50);
wait(2);
}